1 感知是自动驾驶的首要环节,高性能传感器必不可少
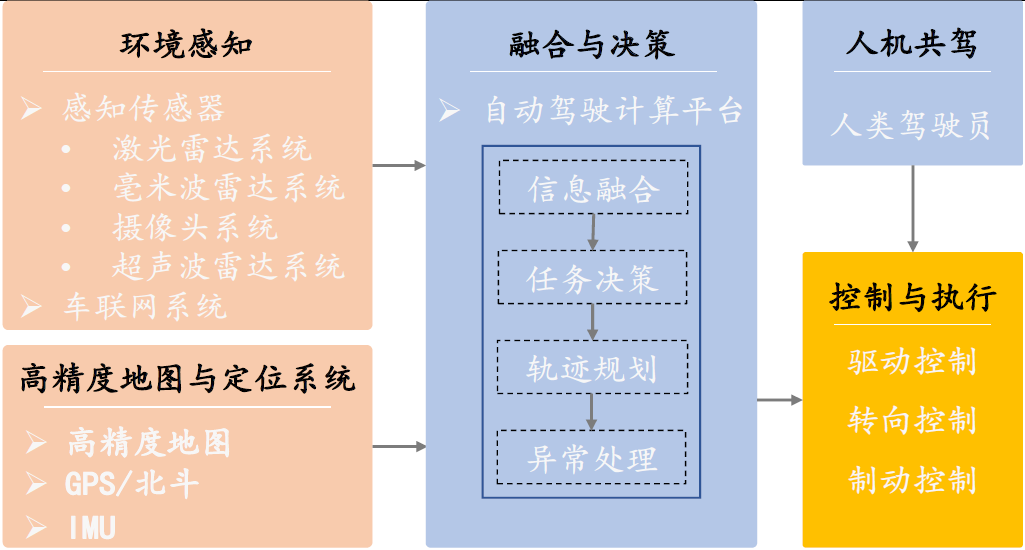
感知环节负责对侦测、识别、跟踪目标,是自动驾驶实现的第一步。自动驾驶的实现,首先要能够准确理解驾驶环境信息,需要对交通主体、交通信号、环境物体等信息进行有效捕捉,根据实时感知的环境信息,自动驾驶系统得以完成接下来的决策、规划与控制等环节。传感器的性能会直接影响到感知信息的质量,目前广泛搭载的传感器有摄像头、激光雷达、毫米波雷达、超声波雷达等。
图1 传感器在自动驾驶实现过程中发挥基础性作用
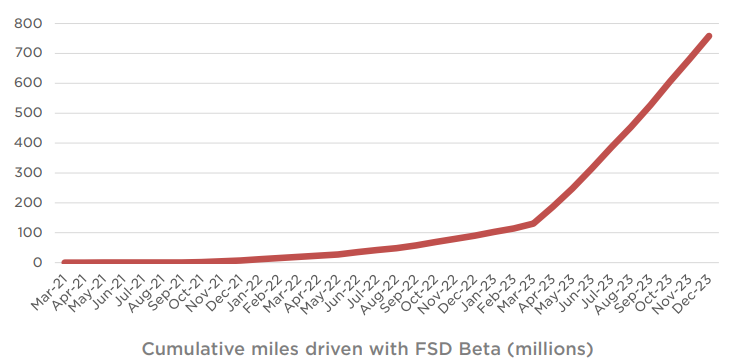
特斯拉的视觉感知方案推动自动驾驶行业进入新的篇章。2021 年,特斯拉使用Transformer 算法构建BEV(Bird’s Eye-View, 鸟瞰图)空间,解决了传统视觉感知的深度探测难点, 从而通过视觉也可以进行较为准确的距离估计; 同时,Transformer 算法更契合多个传感器融合,可拓展性更强。2022 年,特斯拉使用基于BEV+Transformer 和占用网络,形成对外部3D 空间的还原,对通用障碍物感知能力进一步增强。特斯拉依靠摄像头进行感知的FSD 功能已经能够实现近乎对全部驾驶场景的覆盖,累计行驶里程呈指数型增长。
图2 特斯拉占用网络的视觉感知具备3D 空间感知
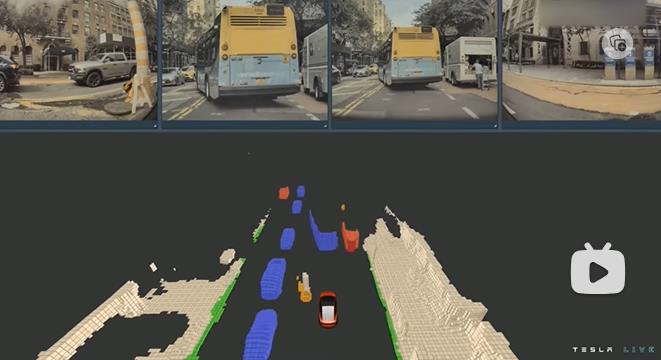
图3 截至2023Q4,FSD 累计行驶里程突破7 亿英里
特斯拉重新使用毫米波雷达辅助摄像头来提升感知能力。2021 年特斯拉放弃使用毫米波雷达,集中资源进行视觉感知能力的提升。2022 年2 月,马斯克坦言只有非常高分辨率的雷达才有意义,将取消毫米波雷达的原因指向“分辨率不足”;同年6 月,特斯拉向美国联邦通信委员会(FCC)注册一款全新高分辨率雷达设备。根据汽车之心公众号,2023 年2 月,国外博主Greentheonly 曝光特斯拉全新的计算平台HW4.0 为毫米波雷达预留了接口;同年6 月,该博主又放出特斯拉新毫米波雷达的实物图。综合推断,特斯拉将要搭载的新款毫米波雷达将是具有高分辨率的4D 成像毫米波雷达。4D 成像毫米波雷达具有诸多优良特性,能够更好地辅助视觉感知方案。
图4 特斯拉向FCC 注册的新雷达示意图
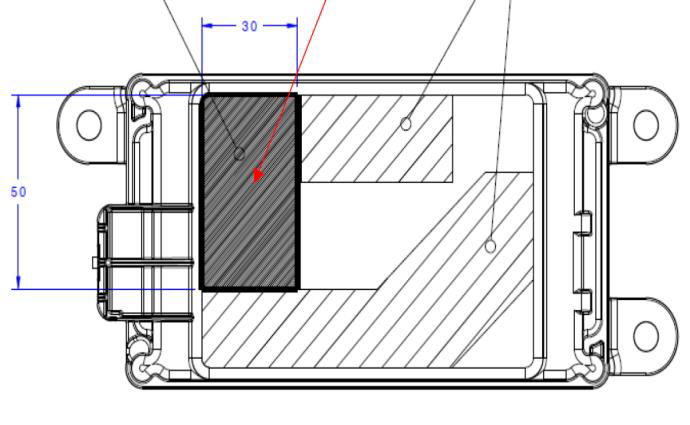
图5:特斯拉新雷达实物图与此前FCC 备案一致

2 毫米波雷达具有“全天候性质”,但存在分辨率不足的问题
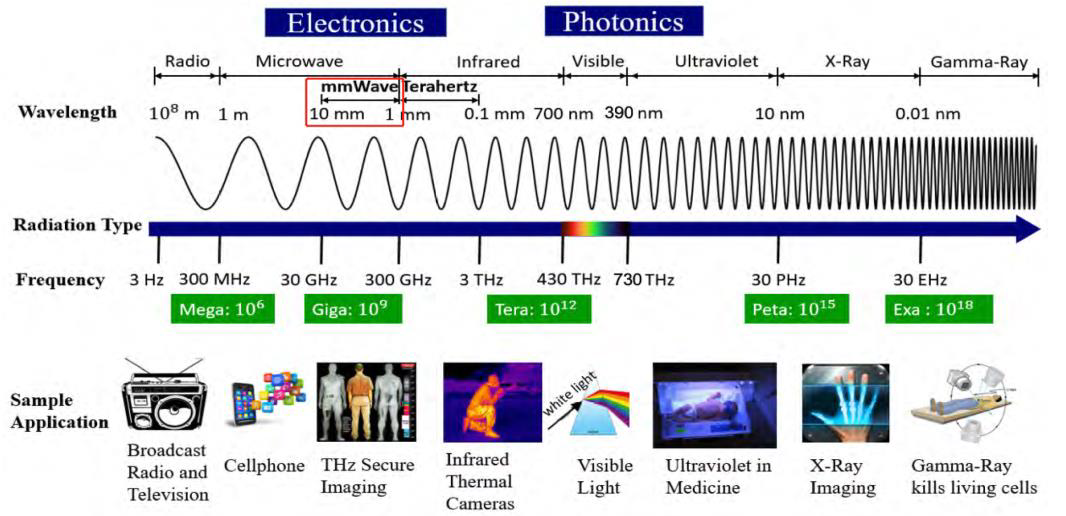
毫米波雷达通过调制、收发、信号处理进行障碍物的感知。毫米波是电磁波,其频段在30-300GHz 之间,属于“极高频”,抗环境噪声干扰能力强;毫米波波长在1-10 毫米之间,与波长通常为数百至上千纳米的激光相比,它的波长更长,具备传输距离远、绕射能力强、穿透性更好等特点。工作在毫米波波段的雷达称为毫米波雷达,在自动驾驶领域广泛应用。
图6:毫米波雷达波长在1-10mm 之间
毫米波雷达主要由雷达前端收发模块、数字信号处理单元以及接口模块组成。雷达前端收发模块进行毫米波信号的调制、发射与接收,包括天线阵列、射频前端、中频电路、模数转换器;数字信号处理单元进行信号处理与数据处理,包括DSP(数字信号处理器)、MCU(微控制单元)或FPGA(现场可编程门阵列)等;接口模块负责数据通信以及与其他系统的集成。毫米波半导体技术已经比较成熟,已经在自动驾驶车辆中广泛应用。
图7:毫米波雷达主要由前端雷达传感器、数字信号处理单元以及接口模块构成
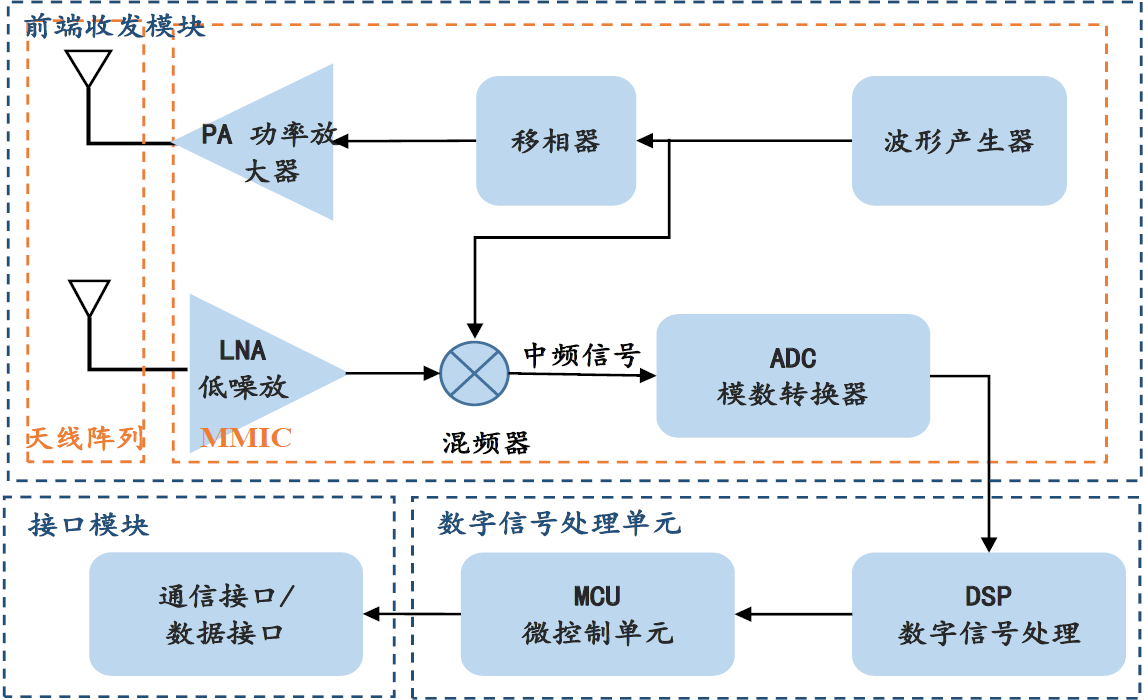
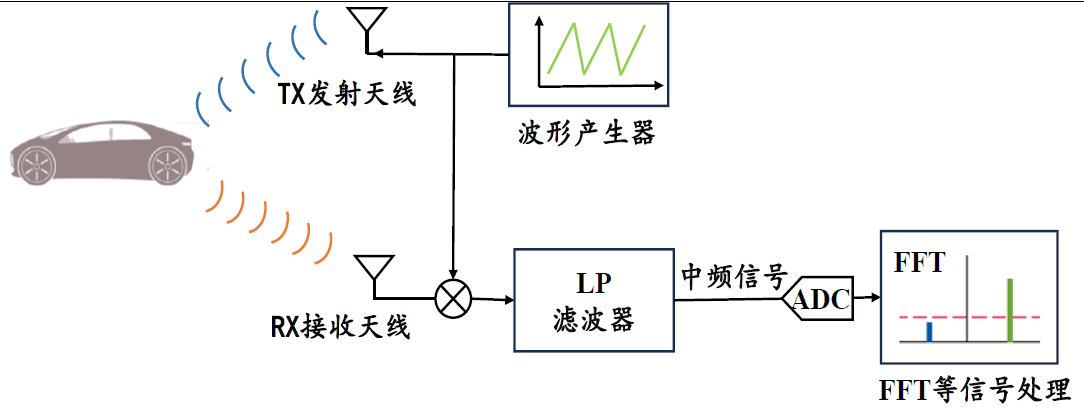
信号收发与信号处理是毫米波雷达运行的重点环节。毫米波雷达工作流程如图7 所示:(1)首先射频发射器产生电磁波信号并且将之发射,信号到达目标物体;(2)物体反射或者散射信号形成回波信号,接收器接收回波信号;(3)混频器将回波信号与原始信号混合,经过滤波器进行滤波,得到中频信号(实际是雷达发射信号与回波信号的频率差,包含有物体的位置、速度等信息);(4)中频信号输入到处理后端进行调制解调、FFT(Fast Fourier Transform,快速傅里叶变换)等算法处理,提取目标信息并进行分析,实现目标检测、距离测量、速度测量、方位估计;
(5)最终将结果输出以进行后续感知处理。
图8:毫米波雷达工作流程
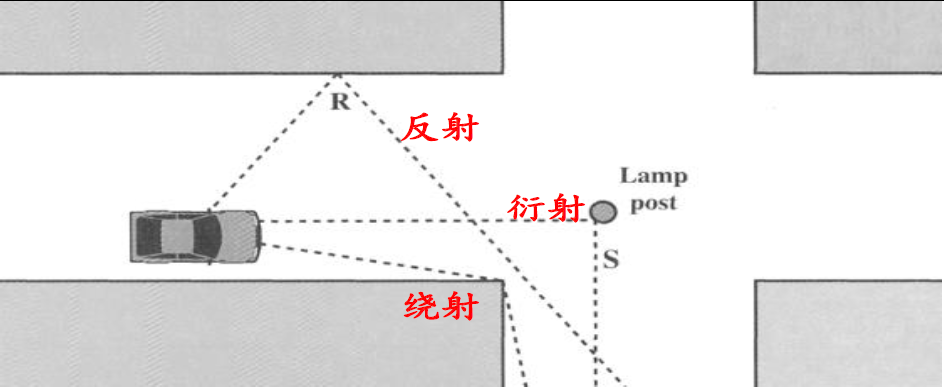
毫米波雷达能够识别遮挡物体,这一特性为其他传感器所不能比拟。毫米波信号具有多径效应,信号通过反射、漫反射、衍射、绕射等方式,能够检测遮挡物体。大陆集团曾提到基于其ARS430 毫米波雷达的经验,这类遮挡车辆大约在40%的场景中可以被发现。当然其探测遮挡物体的性能表现也基于一些条件,如道路表面情况、前车的位置、以及被遮挡车辆的位置等。而算法对于此类场景的探测尤为重要,华为在其4D 毫米波雷达发布会上也着重提到了这一点。因此,对于鬼探头等普通传感器难以处理且事故高发的Cornor Case,毫米波雷达具有无可替代的优势。
图9:多径效应检测识别“隐藏目标”
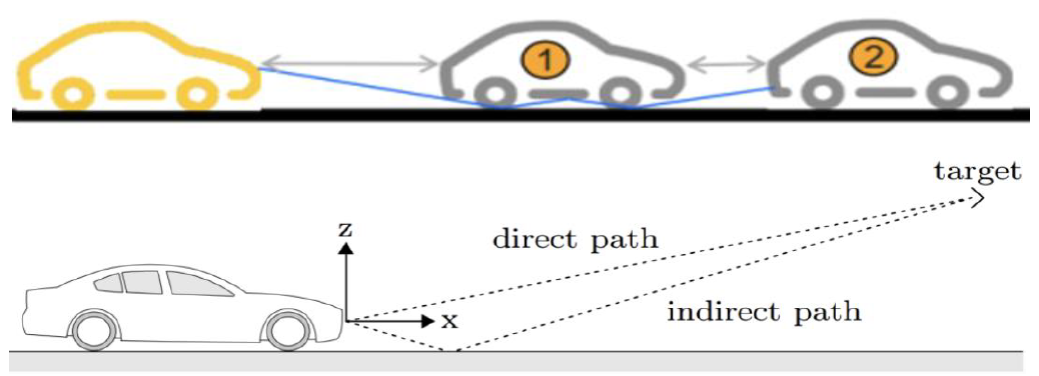
图10:雷达电磁波具有多径效应,能够检测遮挡物体
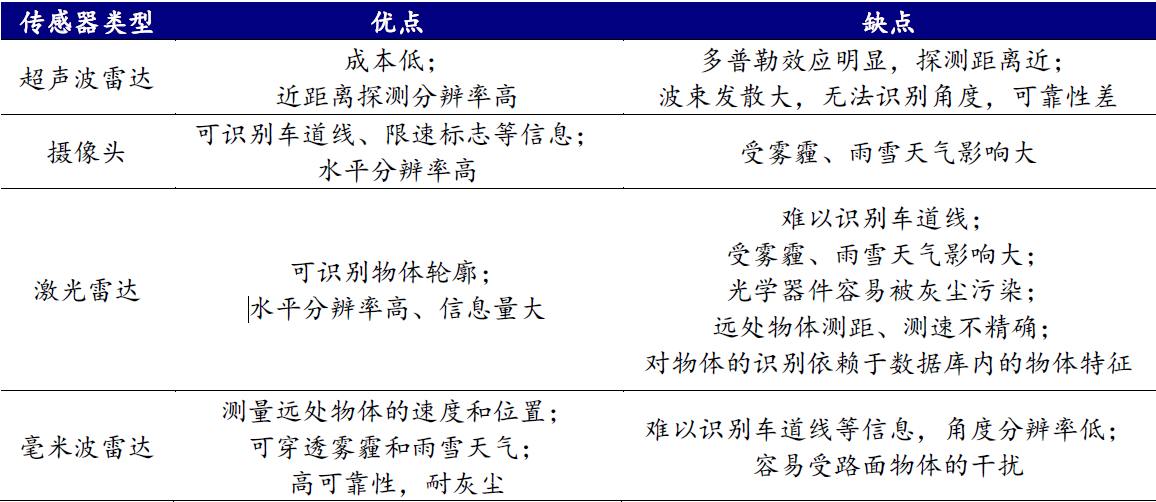
毫米波雷达具有多种优良特性,对智能驾驶不可或缺。(1)“全天候”:相对波长为纳米级的光波,毫米波波长更长,能够轻易穿过比其波长小的障碍物,一般来说,雨滴、雪花的平均直径均在5mm 以下,因此毫米波雷达工作基本不受雨雪雾等天气的影响,具有“全天候”的特点;(2)具备速度信息:基于毫米波的多普勒效应,毫米波雷达可以获得高精度的速度信息,这对于自动驾驶感知至关重要。
表1:毫米波雷达具有全天候等感知优势
摄像头与毫米波雷达能够形成感知系统上的优势互补。摄像头是被动感知传感器,具有成本低、易于集成、语义信息丰富等特点,并且摄像头是数据带宽最高的车载传感器之一,可以提供高分辨率图像与实时视觉信息,但是摄像头容易受到恶劣天气、眩光等环境的影响,没有精确的物体深度信息与速度信息。毫米波雷达在摄像头所不足的方面可以提供有效补充,两类传感器融合则能以较低的成本实现性能更好的自动驾驶感知。
图11:毫米波雷达与摄像头优势互补

传统毫米波雷达无法测高,限制其在自动驾驶中发挥更大的作用。传统毫米波雷达只能探测距离、角度、速度三类信息,由于没有高程信息,限高杆、高架桥等物体容易触发毫米波雷达障碍物反馈,因而实践中只能设定保留动态目标追踪结果或降低毫米波雷达感知权重,导致日常使用中毫米波雷达基本无法识别静止物体。例如特斯拉的辅助驾驶未识别到白色静止卡车导致相撞的事故,是由于摄像头没有分辨出白色车厢与天空的区别,同时毫米波雷达没有准确识别侧翻静止的货车。针对此问题,毫米波雷达需要增加俯仰角的感知能力。
图12:摄像头与毫米波雷达对白色静止卡车识别失误
3 4D 毫米波雷达增添高度维信息,形成精确的感知能力
4D 毫米波雷达增添俯仰角信息,可以识别物体高度。正如上文提到,毫米波雷达由于无法分辨高度维信息,在使用中会将静止物体识别的置信度降低,如无其他可靠传感的情况下,可能导致误刹或漏刹,造成较差的驾驶体验甚至威胁行驶安全。而如果增加俯仰方向的天线排布,毫米波雷达就能够测量到高度信息,从而克服上述不利的情况,4D 毫米波雷达便应运而生。4D 毫米波雷达中的“4D”指的是距离、方位、速度以及高度,4D 毫米波雷达不仅继承了毫米波雷达的优点,包括
“全天候”有效运行、感知遮挡物体,并且在分辨率、精度上更进一步,能够识别较小的物体、静止物体以及空中障碍物。作为毫米波雷达的升级,4D 毫米波雷达具有更优异的性能,对复杂路况展现了更强的适应性。
图13:可以通过天线特殊排布方式实现方位-仰角分辨率
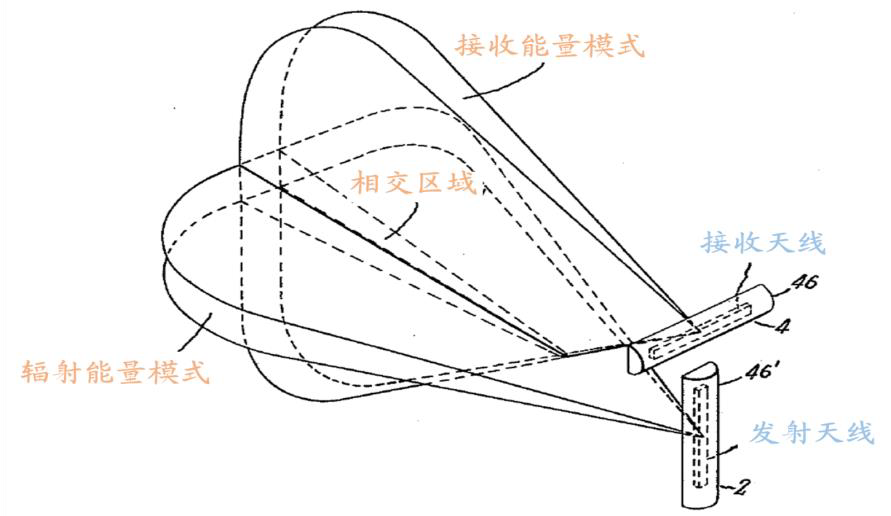
图14:4D 毫米波雷达具备俯仰角测量能力
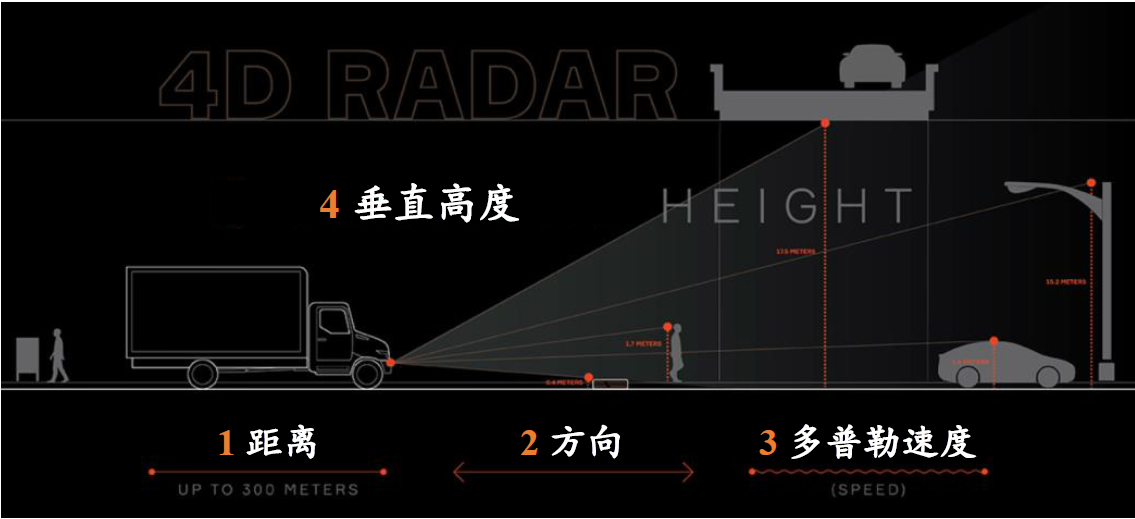
表2:4D 毫米波雷达相对毫米波雷达优势显著

4D 成像毫米波雷达清晰度更进一步,能够输出三维点云图像。通过改进识别算法、增大雷达孔径等方式,4D 毫米波雷达能够像激光雷达一样输出相对密集的三维点云,能够勾勒出物体的形状,进而识别出物体,具有高清的特质,这就是4D 成像毫米波雷达。相邻两个点云之间的角度即为角分辨率,角分辨率越小则代表雷达清晰度越高,4D 成像毫米波雷达的角分辨率最高可以达到1°以内,意味着在200m 远的范围,雷达能够区分相距约3.5 米或以上的两个物体,对近处的物体
的识别则会更加清晰。由于4D 成像毫米波雷达会生成三维点云,因此对比对象常常是激光雷达,而不再是毫米波雷达。
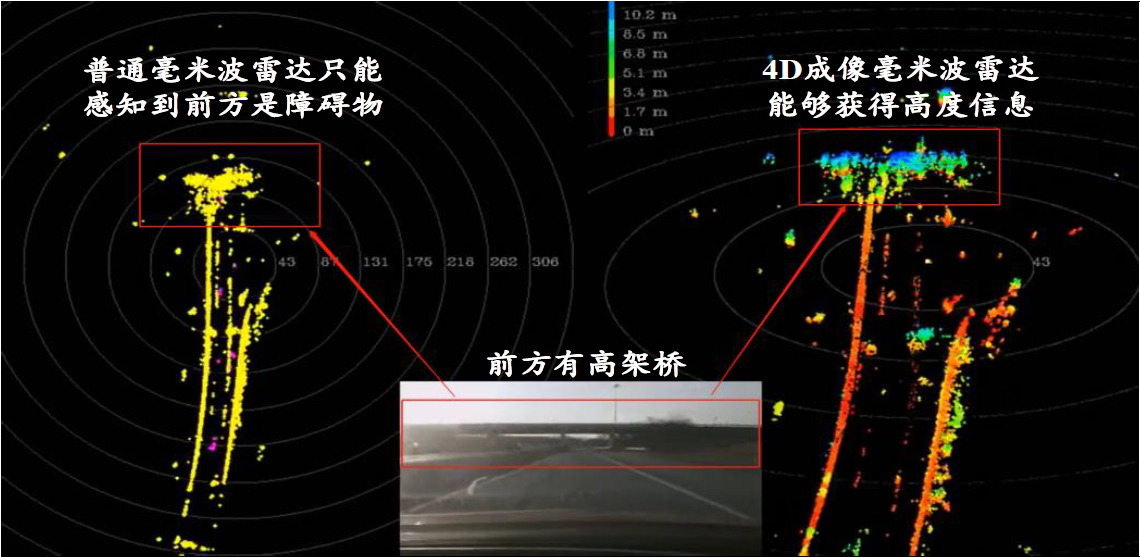
图15:毫米波雷达无法识别高度信息(左),4D 成像毫米波雷达点云清晰(右)
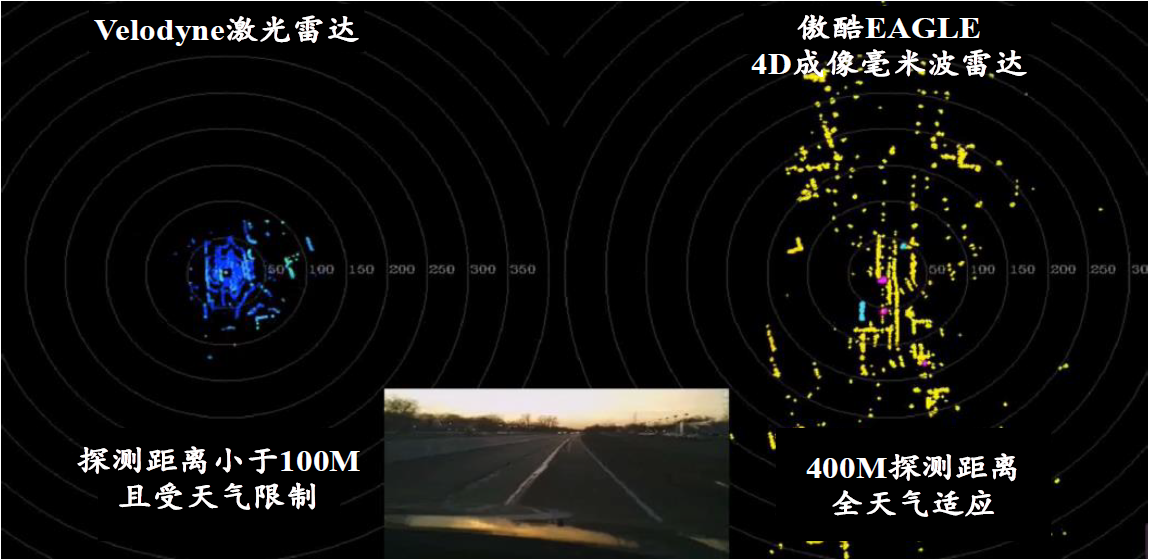
毫米波雷达经过多年发展性价比凸显,点云效果媲美低线束激光雷达。激光雷达具有优秀的性能表现,在905nm 和1550nm 波段广泛应用,可以发射大量激光束进行路况扫描,形成高分辨率点云图像,并且能够对路况进行初步判断,还可以输出目标距离、方位、高度、速度、形态等信息。但由于激光雷达波长短,穿透力弱,同功率下探测距离受限同时还容易受到恶劣天气干扰。4D 成像毫米波雷达点云效果已经可以和低线数激光雷达相当,同样具有高灵敏度与高分辨率的特性,且成本总体较低。在搭载激光雷达的车型上,4D 成像毫米波雷达能够作为安全冗余发挥功能,提升自动驾驶的安全性;在未搭载激光雷达的车型上,4D 成像毫米波雷达能够作为激光雷达的传感器平替,实现自动驾驶功能,助力智能驾驶的普及。Mobileye 在CES 大会上提出,到2025 年,L4 级别自动驾驶感知方案中将只搭载一颗前向激光雷达,侧向将用六颗4D 毫米波雷达来代替两颗激光雷达,以实现L4 级别感知功能,并达到大幅缩减成本的目的。
表3:4D 毫米波雷达性能能够媲美低线激光雷达

图16:Oculii EAGLE 对比Velodyne 16 线激光雷达,能够覆盖更远距离
4D 成像毫米波雷达是自动驾驶优秀辅助传感器。特斯拉通过Transformer 算法构建BEV 空间,能够对动态物体与静态物体进行有效感知,占用网络又提升其对通用障碍物的感知能力。就4D 毫米波雷达而言,性能方面,相比纯视觉方案通过算法预测距离信息而并非获取真值,激光雷达和4D 毫米波雷达等获取的真值距离信息意味着更高的安全保障;毫米波雷达探测的速度信息精度高于激光雷达,更有助于识别物体运动轨迹和方向。算法层面,诸多多传感器融合的感知算法如BEVFusion 等诞生,有效帮玩家将4D 毫米波雷达信息融入感知系统。因此4D 毫米波雷达有望成为自动驾驶感知的重要组成,助力产品功能落地。

![[附源码]石器时代_恐龙宝贝内购版_三网H5手游_带GM工具](https://img-blog.csdnimg.cn/img_convert/666bd838d6d5b25b57905082eacdb454.webp?x-oss-process=image/format,png)